Tukee täysin kaaria, laseria, plasmaa, laser-kaariyhdistelmää ja muita lämmönlähteitä; tukee sulamista, pölyn syötettä tai langan ja pölyn syötettä;
Tukee kaikenlaisia yleisiä DED-laitteistojärjestelmien toimilaitteita, mukaan lukien: kolmiakselinen / viisiazkelinen CNC, teollisuusrobotit ja ulkoisten akselien laajennus.
Tukee CNC-järjestelmiä, kuten Siemens, Huazhong, Guangshu, ja tukee robottimerkkejä, kuten ABB; Fanuc; KUKA; JAKA;
Voi laajentaa korkean tason lisäysvalmistuksen toimintomoduuleja, mukaan lukien: ulkoisen akselin yhteistoiminnallinen lisäysvalmistus, useiden työkalujen yhteistyö lisäysvalmistuksessa, monimateriaalinen yhdistelmälisäysvalmistus;
Tukee kerrosprosessointityökalujen ohjausta, kuten laserpuhdistusta, pistoolin puhdistusta ja langan leikkausta.
Tukee yleisiä viipalointi- ja täyttöpolkumenetelmiä sekä omia akselikohtaisia edestakaisia, yksittäisiä polkuja ja spiraalipolkuja, jotka soveltuvat paremmin monimutkaisiin muotoihin (esim. muuttuva seinämäpaksuus, erikoismuotoiset ääriviivat, ohutseinäiset osat, gyroskoopit jne.);
Parametrinen nopea ohjelmointi, jossa käytetään parametroitua konfigurointia kerrosten jakamiseen, täyttöön, prosessikirjastoon, polkuun, työkaluparametreihin jne., soveltuu DED-prosessiin, ohjelmisto luo lisäysvalmistusohjelman automaattisesti ja ohjaa suoraan robottia tai työstökoneen työkalupäätä suorittamaan lisäystoiminto ilman, että koodia tarvitsee kopioida robotin pääteeseen tai monimutkaista manuaalista ohjelmointiprosessia.
Esivalmiita lisäysvalmistusprosessikirjastoja, joita voidaan kehittää uudelleen, joiden avulla voidaan määrittää, tallentaa ja kutsua lisäysparametrejä sekä tukea prosessin kehitystä ja sertifiointia;
Lisäyksen jälkeen luodaan lisäysraportti, jota käytetään lisäysvalmistustuotteiden valmistusprosessin tarkastukseen.
Yhdistämällä erilaiset DED-lisäysprosessien ominaisuudet, lisäysprosessiohjelmaa on optimoitu älykkäästi koko työkappaleen ja erityispiirteiden (kuten limittymät, kulmat, ohuet seinät, muuttuvan seinämäpaksuuden kohdat ym.) osalta mukaan lukien polun optimointi, kaaren aloituksen ja lopetuksen optimointi, nopeuden optimointi ym., jotta tulostusvirheiden esiintyminen vähenee.
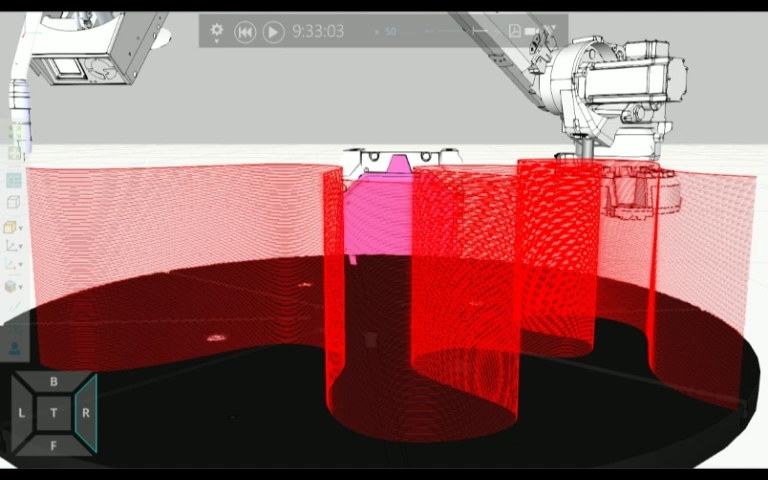
Erittäin tarkan asettelusimuloinnin ja dynaamisen polkusimuloinnin avulla voidaan suorittaa 360°:n dynaaminen nopeuden vaihtaminen, saavutettavuus, nivelrajoitukset, singulariteetit ja törmäysriskit voidaan varmistaa etukäteen, ja lisäyspolkua voidaan tarkistaa offline-tilassa simuloidulla kontuuritarkkuudella, joka on jopa 0,25 mm.
Käyttämällä ainutlaatuista dynaamista reitin suunnittelualgoritmia, yhdistettynä kerroskohtaiseen lämpötilan hallintaan sekä sulamisaltaan seuranta- ja analyysitekniikoihin, voidaan automatisoida lisäävän valmistuksen prosessin kehitystyö, mikä lyhentää huomattavasti prosessisuunnittelun ja ohjelmointikehityksen kestoa. (Vaaditaan IungoQMC-ohjelmisto ja laitemoduulit, kuten konenäkö, prosessiparametrit ja ympäristöparametrien havainto).